Astro Seminar - "Drone Calibration for 21cm Experiments"
Emily Kuhn
(Yale University)
Jan 18, 2022 3:30 PM
Location: Virtual Seminar
Astro Seminar
Title: Drone Calibration for 21cm Experiments
Abstract:
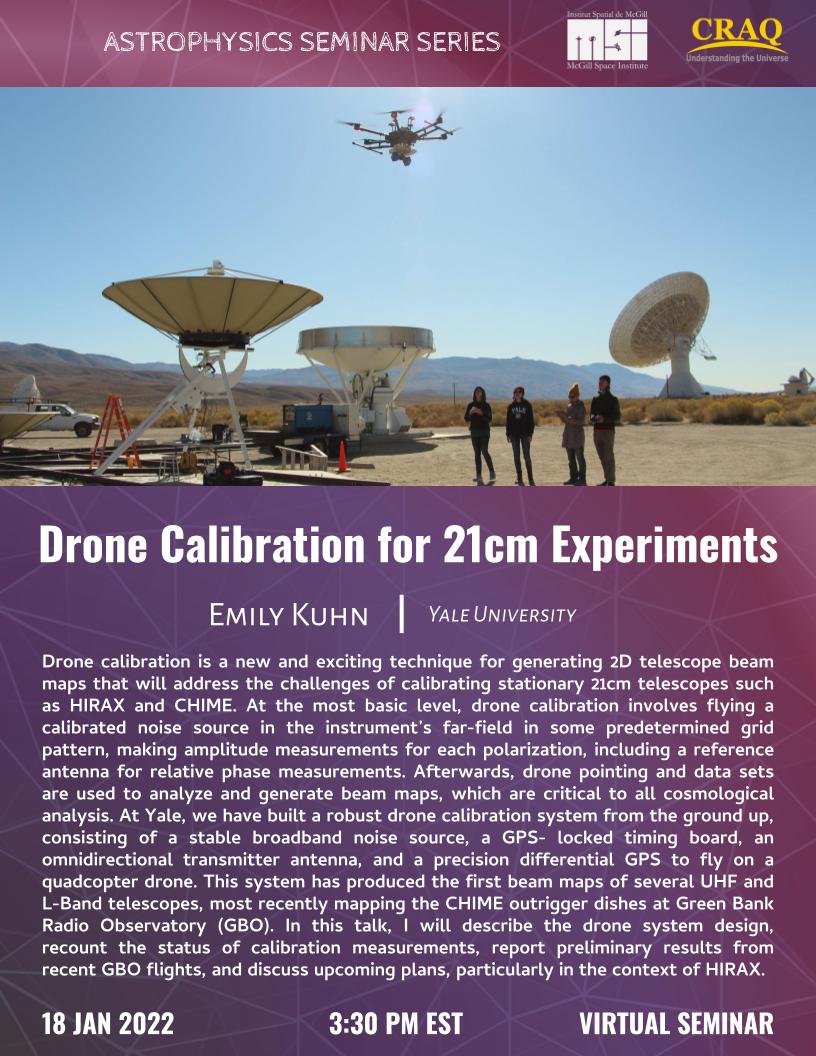
Drone calibration is a new and exciting technique for generating 2D telescope beam maps that will address the challenges of calibrating stationary 21cm telescopes such as HIRAX and CHIME. At the most basic level, drone calibration involves flying a calibrated noise source in the instrument’s far-field in some predetermined grid pattern, making amplitude measurements for each polarization, including a reference antenna for relative phase measurements. Afterwards, drone pointing and data sets are used to analyze and generate beam maps, which are critical to all cosmological analysis. At Yale, we have built a robust drone calibration system from the ground up, consisting of a stable broadband noise source, a GPS- locked timing board, an omnidirectional transmitter antenna, and a precision differential GPS to fly on a quadcopter drone. This system has produced the first beam maps of several UHF and L-Band telescopes, most recently mapping the CHIME outrigger dishes at Green Bank Radio Observatory (GBO). In this talk, I will describe the drone system design, recount the status of calibration measurements, report preliminary results from recent GBO flights, and discuss upcoming plans, particularly in the context of HIRAX.
Watch the livestream.
More
about Emily Kuhn
⇒